
科学家让纳米级“变形金刚”灵动起来
科学家让纳米级“变形金刚”灵动起来
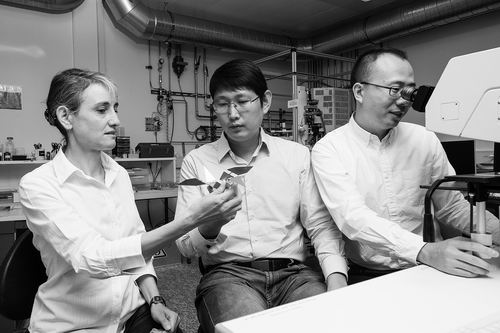
Laura Heyderman(左)和黄天云(中)看着一只折纸鸟的模型,崔继斋(右)则在显微镜下观察真正的微型机器人。 图片来源:保罗谢尔研究所
过去几年里,软体机器人采用了类似的原理实现运动。不过,因为几何结构和驱动控制的限制,只能产生一种形变。想要让它真正大展“身手”,还需要通过精确计算外部磁场作用于磁体上的力和力矩建立模型并定量描述,设计机器人的运动。
谈起变形金刚大家可能并不陌生,但是纳米级的变形金刚你见过吗?
比起体积庞大的刚性机器人,由软材料或具有柔性结构的材料构建的微型机器人似乎能够更安全地与人类互动。不过想要让它们随心所欲地“变身”,科学家费尽了脑筋。
近日,瑞士联邦理工学院、保罗谢尔研究所研究员崔继斋、博士黄天云所在团队通过对单个区域的纳米磁体进行设计,将形状变化指令通过编程的方式输入微型机器人。对纳米磁体施加特殊的磁场序列后,实现微型机器人的形状变化。相关成果发表于《自然》。
搭建磁控系统
如何让机器人跟着你“左手右手一个慢动作”?老祖宗早就告诉了我们答案。
中国古代典籍《鬼谷子》与《韩非子》中曾提出,磁石是与地球磁场相一致的矿物质,并将其应用于早期的罗盘。只要磁场发生改变,罗盘的指针就会发生转动。
假如我们把罗盘的指针想象成机器人的四肢,便可一目了然。
过去几年里,软体机器人就采用了类似的原理实现了运动。不过,因为几何结构和驱动控制的限制,只能产生一种形变。想要让它真正大展“身手”,还需要通过精确计算外部磁场作用于磁体上的力和力矩建立模型,并定量描述来设计机器人的运动。
论文通讯作者崔继斋告诉《中国科学报》,“想让机器人灵活运动,你需要反复改变磁场条件,普通磁铁是做不到的。不过,使用我们搭建的磁性控制系统,通过线圈改变信号就便捷得多。”
此外,机器人的形状大小设计也至关重要,这直接决定了它的未来应用。“磁性软体机器人的进一步小型化可能带来新的应用,如在最小的血管中进行操作甚至操纵单个细胞,如定向药物输运、生物活检以及心脏支架安置等。”崔继斋说,“这不是黑科技,而是能够广泛应用。”
“我们研制的机器人最小只有几微米大小,是真正的微纳米级机器人。”他说。
让机器人“大展身手”
那么,有没有什么方法可以让微纳米机器人自由变换形态?为此,团队提出了一种新的策略,即在微纳米机器人上制备了单磁畴的纳米磁体,从而使得变形信息可以被重复编码到微纳米机器人中。
瑞士联邦理工学院教授Laura Heyderman告诉《中国科学报》,实验人员使用了高精度电子束曝光的方法来加工纳米磁体和机器人的结构。“机器人的结构由纳米尺度的弹簧和刚体面板组成。我们向机器人施加了一系列不同大小和方向的磁场,对机器人进行变形信息的编码。”
“机器人的加工非常困难。我们花费了三年的时间,才开发出理想的纳米加工流程。”她说。
首先,团队在柔性氮化硅(Si3N4)薄片基板上制备纳米级钴磁体阵列,即在纳米薄膜上“生长”磁体。“因为需要很高的热量,不可避免地就会出现热胀冷缩。但是纳米薄膜非常敏感, 温度一高就起褶皱发生形变,所以这需要很高的工艺。”
论文通讯作者黄天云给《中国科学报》打了一个形象的比喻,“我们在纳米薄膜上去‘生长’磁体。小磁体有磁性,需要和外部磁场一致。通过设计磁体方向让一部分磁体向左、一部分向右。这样,如果加个向上磁场,小磁体就会带着基板向上竖立起来。施之相反的磁场方向,基板就会向下。由此产生折叠变形的效果”。
由于磁滞作用,在没有外加磁场的情况下,这种钴纳米磁性材料仍能保持磁性。这和纳米磁铁的形状息息相关。通常来说,细长的纳米磁体更难磁化。通过施加一系列不同大小和方向的磁场,可以编辑基板上不同形状的纳米磁体的磁化方向。
由此产生的薄片组合经过“编程”可以在驱动磁场中形变得到特定的结构。这些结构可以进一步组装成复杂的形状,比如字母,甚至可以用显微镜来观察组装得到的“鸟”的转身、振翅和滑翔等。
最后,研究人员在液体中释放机器人,测试变形能力,均取得满意效果。
“进得去”还要“出得来”


同类文章排行
- 苹果有多赚钱?iPhone X利润硬抗整个Android圈
- 全系麒麟810+超强夜拍 超能旗舰荣耀9X正式发布
- 中国微电机行业门户网站
- 【1807班】新学期第一次班会——以往鉴来,砥砺前行
- 12月29日新闻茶泡Fan
- 9月13日新闻茶泡Fan
- 聚焦互联时代的“LED+” 重塑半导体照明产业格局
- 真快!Mate9还没来 华为P10的消息就出来了!
- 人工智能怎样变得更加的务实
- 12月5日新闻茶泡饭
最新资讯文章
- 【1707班】浓情夏日,温情班建
- 【1704班】中秋之际,“团圆”之时
- 2019-2020学年班团委换届大会暨第一次班会
- 【1802班】中秋节DIY月饼大赛
- 【1807班】新学期第一次班会——以往鉴来,砥砺前行
- 【1702班】与1701班“磨山半日游”联合班活
- 【1705班】
- 【1909班】记1909班级主题活动
- 【1908班】坚持不懈,勇辩高峰
- 【1905班】“拥抱青春的魅力”主题班活圆满结束
- 【1907班】暖冬文艺活动
- 【1802班】1802班与1801班马鞍山联谊活动
- 【1807班】期末动员大会
- 【1907班】回归童年,守住初心
- 【1806班】天空因为梦想更加绚烂,班级因为有爱
- 【1903班】“家的温暖”主题班活圆满结束
- 【1807班】定向越野活动
- 赢享中国·强力巨彩杯2015年LED显示屏行业高峰论
- 如何深挖CSP潜在价值让LED企业更具竞争力?
- LED驱动欧洲新版标准解读:未雨绸缪才能掌握市

